For a personal project, I'd need to find out if two cubic Bézier curves intersect. I don't need to know where: I just need to know if they do. However, I'd need to do it fast.
I've been scavenging the place and I found several resources. Mostly, there's this question here that had a promising answer.
So after I figured what is a Sylvester matrix, what is a determinant, what is a resultant and why it's useful, I thought I figured how the solution works. However, reality begs to differ, and it doesn't work so well.
Messing Around
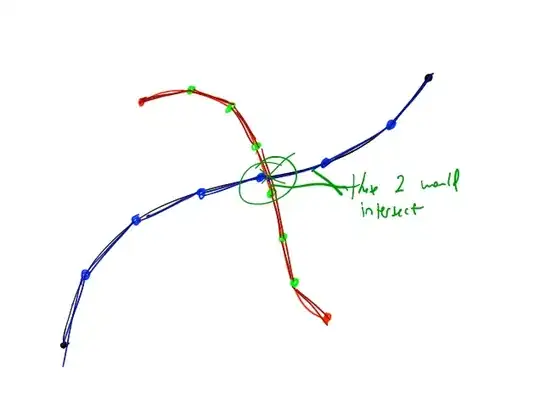
I've used my graphing calculator to draw two Bézier splines (that we'll call B0 and B1) that intersect. Their coordinates are as follow (P0, P1, P2, P3):
(1, 1) (2, 4) (3, 4) (4, 3)
(3, 5) (3, 6) (0, 1) (3, 1)
The result is the following, B0 being the "horizontal" curve and B1 the other one:
Following directions from the aforementioned question's top-voted answer, I've subtracted B0 to B1. It left me with two equations (the X and the Y axes) that, according to my calculator, are:
x = 9t^3 - 9t^2 - 3t + 2
y = 9t^3 - 9t^2 - 6t + 4
The Sylvester Matrix
And from that I've built the following Sylvester matrix:
9 -9 -3 2 0 0
0 9 -9 -3 2 0
0 0 9 -9 -3 2
9 -9 -6 4 0 0
0 9 -9 -6 4 0
0 0 9 -9 -6 4
After that, I've made a C++ function to calculate determinants of matrices using Laplace expansion:
template<int size>
float determinant(float* matrix)
{
float total = 0;
float sign = 1;
float temporaryMatrix[(size - 1) * (size - 1)];
for (int i = 0; i < size; i++)
{
if (matrix[i] != 0)
{
for (int j = 1; j < size; j++)
{
float* targetOffset = temporaryMatrix + (j - 1) * (size - 1);
float* sourceOffset = matrix + j * size;
int firstCopySize = i * sizeof *matrix;
int secondCopySize = (size - i - 1) * sizeof *matrix;
memcpy(targetOffset, sourceOffset, firstCopySize);
memcpy(targetOffset + i, sourceOffset + i + 1, secondCopySize);
}
float subdeterminant = determinant<size - 1>(temporaryMatrix);
total += matrix[i] * subdeterminant * sign;
}
sign *= -1;
}
return total;
}
template<>
float determinant<1>(float* matrix)
{
return matrix[0];
}
It seems to work pretty well on relatively small matrices (2x2, 3x3 and 4x4), so I'd expect it to work on 6x6 matrices too. I didn't conduct extensive tests however, and there's a possibility that it's broken.
The Problem
If I understood correctly the answer from the other question, the determinant should be 0 since the curves intersect. However, feeding my program the Sylvester matrix I made above, it's -2916.
Is it a mistake on my end or on their end? What's the correct way to find out if two cubic Bézier curves intersect?