I'm hoping that someone can help me out with this problem, or at least point out the error of my ways...
As a simple illustration of my problem consider a part of an application where you can enter a "Functions Mode" state of operation. Four sub-modes are then available depending on which function key F1-F4 that the user presses. By default, F1 mode is entered. The state diagram starts off as follows:
The user can press F1-F4 at any time to switch to the corresponding mode. Adding these transitions to the inner states leads to the following:
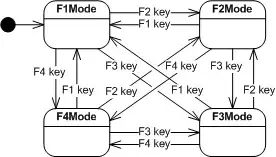
Obviously this is (a) a mess, and (b) a lot of transitions to define. If at some point I want to add an F5Mode then... well, you get the picture. To avoid this I'd like to do the following:

Boost Statechart allows me to define transitions from FunctionMode to any of the inner states, but the result isn't what I expected. The actual outcome is as follows:
I.e. pressing F1-F4 to switch modes causes the outer FunctionMode state to be exited and re-entered along with triggering the unwanted exit and entry actions.
Way back in 2006, this thread between the library author and a user seems to describe the same problem. I think that the author suggests doing the following as a work-around:
However, that work-around doesn't seem very appealing to me: It has added an extra state level to be compiled, the code has become less readable, deep-history would have to be used to return to any of the function mode sub-states and the Intermediate state object is needlessly being destructed and constructed again.
So... where am I going wrong? Or what are the alternatives? I've had a brief look at Boost Meta State Machine (msm) but from what I've seen so far I much prefer the look of Statechart.
I'm surprised that more users haven't faced the same problem... which makes me think that perhaps my approach is completely wrong!