Lots of posts talk about the gyro drift problem. Some guys say that the gyro reading has drift, however others say the integration has drift.
So, I conduct one experiment. The next two figures are what I got. The following figure shows that gyro reading doesn't drift at all, but has the offset. Because of the offset, the integration is horrible. So it seems that the integration is the drift, is it?
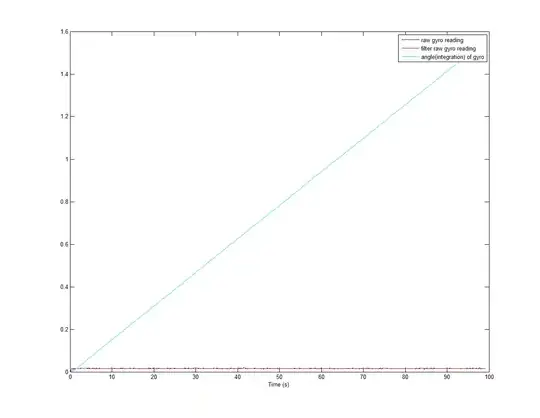
The next figure shows that when the offset is reduced the integration doesn't drift at all.
In addition, I conducted another experiment. First, I put the mobile phone stationary on the desk for about 10s. Then rotated it to the left then restore to back. Then right and back. The following figure tells the angle quite well. What I used is only reducing the offset then take the integration.
So, my big problem here is that maybe the offset is the essence of the gyro drift(integration drift)? Can complimentary filter or kalman filter be applied to remove the gyro drift in this condition?
Any help is appreciated.