I'll add an example that worked for me, using Hoan's answer, and also highlight some new resources that are available now and may help when looking at apps that need to use the gyro sensors.
Firstly, there is a Google Code lab available with a sample app - I found the completed sample app very useful for understanding a devices behaviour.
The app display looks like this:
The codelabs and the final app version is available at these links (at the time of writing):
In particular this allows you experiment as follows (its easier to do than describe...):
put your device down flat on a table and experiment with rotating on the table while flat, lifting top and bottom (i.e. lift the top of the display, where your front camera typically is, from the table while leaving the bottom, where your home button typically is if you have one, on the table. Similarly, lift the left and right edges of the device. Observe the azimuth, pitch and roll values in the app.
Put your device against a wardrobe door in portrait mode and again experiment moving it around. Open the door to see the effect also. Rotate to landscape to see the difference.
The key thing I think you may see from the above is that everything is very simple and works well when flat and everything is complex and interrelated when not flat.
Looking specifically at a use case I had to display the pitch and roll when vertical in portrait mode, the following worked for me:
when (event?.sensor?.type) {
Sensor.TYPE_ROTATION_VECTOR -> {
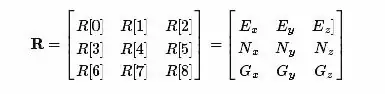
// Calculate the rotation matrix
val rotMatrix = FloatArray(9)
var rotationMatrixAdjusted = FloatArray(9)
val azimuthChanged: (Float) -> Unit
val orientation = FloatArray(3)
SensorManager.getRotationMatrixFromVector(rotMatrix, event.values);
SensorManager.remapCoordinateSystem(rotMatrix,
SensorManager.AXIS_Y, SensorManager.AXIS_MINUS_X,
rotationMatrixAdjusted);
SensorManager.getOrientation(rotationMatrixAdjusted, orientation)
val rollAngleRadians = orientation[1]
val pitchAngleRadians = orientation[2]
//Report results back to listener
thisListener.onRollPitchEvent(rollAngleRadians, pitchAngleRadians)
}
}