I took the example of code for calibrating a camera and undistorting images from this book: shop.oreilly.com/product/9780596516130.do
As far as I understood the usual camera calibration methods of OpenCV work perfectly for "normal" cameras.
When it comes to Fisheye-Lenses though we have to use a vector of 8 calibration parameters instead of 5 and also the flag CV_CALIB_RATIONAL_MODEL in the method cvCalibrateCamera2.
At least, that's what it says in the OpenCV documentary
So, when I use this on an array of images like this (Sample images from OCamCalib) I get the following results using cvInitUndistortMap: abload.de/img/rastere4u2w.jpg
{kind=link}
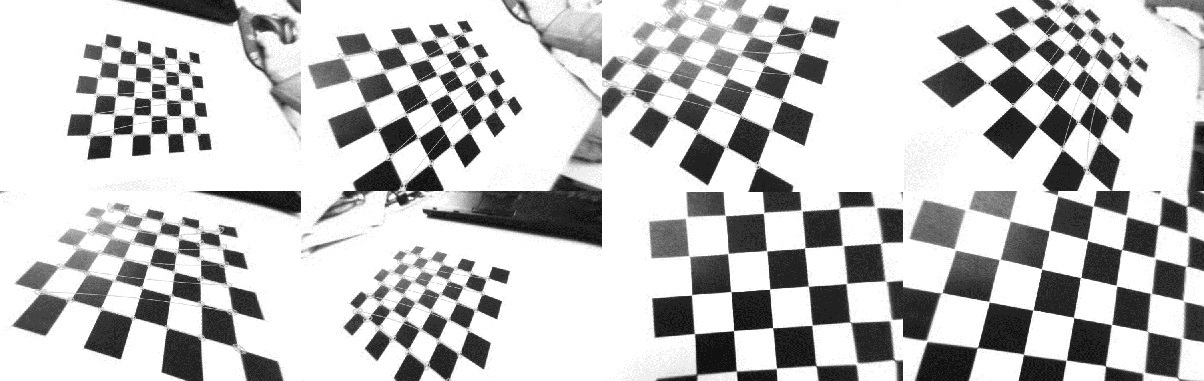{kind=link}
Since the resulting images are cut out of the whole undistorted image, I went ahead and used cvInitUndistortRectifyMap (like it's described here stackoverflow.com/questions/8837478/opencv-cvremap-cropping-image). So I got the following results: abload.de/img/rasterxisps.jpg
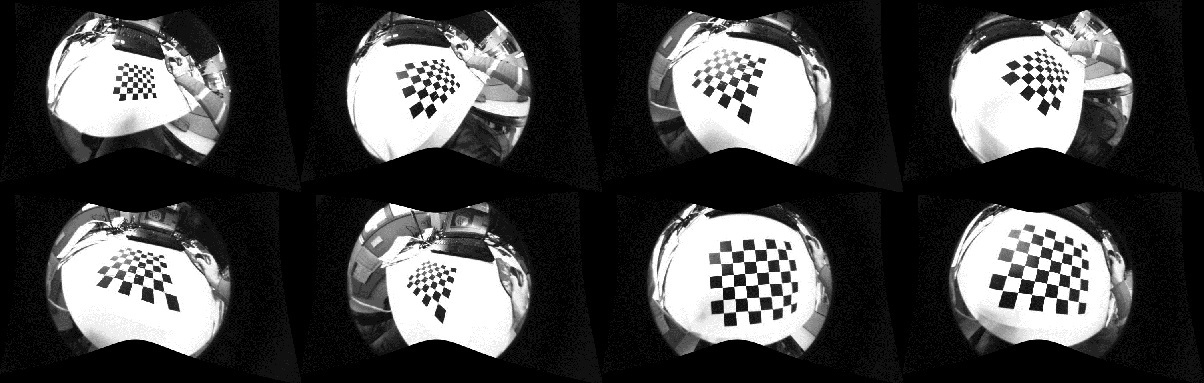{kind=link}
And now my question is: Why is not the whole image undistorted? In some pics of my later results you can recognize that the laptop for example is still totally distorted. How can I acomplish even better results using the standard OpenCV methods?
I'm new to stackoverflow and I'm new to OpenCV as well, so please excuse any of my shortcomings when it comes to expressing my problems.
{kind=link}