Encoding the rules
You correctly note that if an individual x is an instance of p value y, then you'll infer the assertion p(x,y). However, simply saying that x is an instance of p some Y doesn't (without some more information) won't let you infer that p(x,yi) for any particular yi, even if yi is the only particular instance of Y that you've declared. This is because OWL makes the open world assumption; just because you haven't said something is true (or false) yet doesn't mean that it couldn't be true (or false). (Of course, you might have already said other things that would let you figure out whether something is true or false.) This is described in more detail in another question, Why is this DL-Query not returning any individuals?
If I've understood it correctly, what you're trying to do is say something like:
- every Vehicle is related by hasAction to every Action
- every Car is related by hasAction to every CarAction
- every Truck is related by hasAction to every TruckAction
There are a couple of ways that you could do this. The easiest is to simply use some SWRL rules, and the other is called rolification.
Using SWRL Rules
You can write SWRL rule counterparts of the rules above, and the they're pretty easy to write:
Vehicle(?v) ∧ Action(?a) → hasAction(?v,?a)
Car(?v) ∧ CarAction(?a) → hasAction(?v,?a)
Truck(?v) ∧ TruckAction(?a) → hasAction(?v,?a)
If you use all of these rules, you'll find that each of your vehicles has more actions than you want it to, because, by the first rule, each vehicle is related to each action. E.g., since each TruckAction is also an Action, and since each Car is a Vehicle, the first rule will relate each TruckAction to each Car, and you didn't really want that. Even so, using some rules may well be the easiest option here.
Using Rolification
If you don't want to use SWRL rules, then another option is rolification. I've described rolification and how to do it in answers to a few questions, so you should have a look at:
Those will give you more details about rolification. The main point, though, is that we get new properties, e.g., RCar, that have a special behavior: they only relate instances of a particular class to that same instance. E.g., RCar relates each instance of Car
to itself, and doesn't do anything else. It's effectively an equivalence relation on a particular class.
How is rolification useful here? It means that we can use subproperty chain axioms to infer some hasAction properties. E.g.,
hasAction ⊑ RCar • topObjectProperty • RCarAction
That's essentially equivalent to the SWRL rule (topObjectProperty is a built in property of OWL that relates everything to everything):
RCar(?c,?c) ∧ topObjectProperty(?c,?a) ∧ RCarAction(?a,?a) → hasAction(?c,?a)
There are two advantages, though:
- the subproperty chain axiom doesn't require a reasoner to have SWRL support; and
- the subproperty chain axiom works on all individuals, but the SWRL rule works only on named individuals, so you get somewhat better coverage.
You'll still have the same issue that you did with the specificity of the SWRL rules, though; if you say that every Vehicle is related to every Action by hasAction, then that subproperty chain will also apply to subclasses of vehicle and subclasses of action.
There's a significant disadvantage, though: for each class that you want to use in one of these "rules," you need a new property and an equivalent class axiom, and that gets to be sort of tedious.
A different hierarchy for actions
Because both the SWRL rule approach and the subproperty chain with rolification approaches have the problem that the generic rule that relates each vehicle to each action will capture all the actions from subclasses of Action and vehicles from subclasses of Vehicles, you may need to restructure one of your hierarchies a bit. I'd suggest that rather than
Action
CarAction
TruckAction
that you use
Action
VehicleAction
CarAction
TruckAction
and not mirror the hierarchy that you have under Vehicle. This way you can write rules of the form:
every Vehicle is related to every GenericAction by hasAction
every Car is related to every CarAction by hasAction
every Truck is related to every TruckAction by hasAction
With SWRL rules
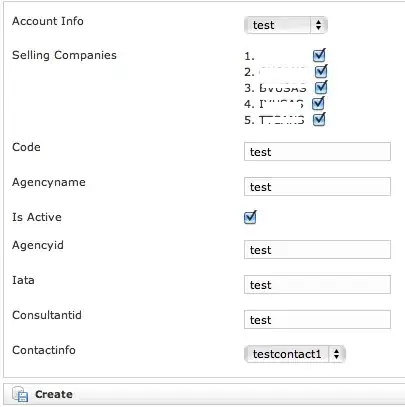
If you do this with SWRL rules, it looks like this:
(The default layout for Protégé might not include a place to edit SWRL rules though. See my answer to Ontology property definition in Protégé-OWL / SWRL for instructions on getting one. It's just a minor interface tweak; you don't need to download or install anything.) This produces results like this:
You can copy and paste this ontology:
@prefix : <https://stackoverflow.com/q/21512765/1281433/cars#> .
@prefix rdfs: <http://www.w3.org/2000/01/rdf-schema#> .
@prefix swrl: <http://www.w3.org/2003/11/swrl#> .
@prefix owl: <http://www.w3.org/2002/07/owl#> .
@prefix xsd: <http://www.w3.org/2001/XMLSchema#> .
@prefix swrlb: <http://www.w3.org/2003/11/swrlb#> .
@prefix rdf: <http://www.w3.org/1999/02/22-rdf-syntax-ns#> .
:Action a owl:Class .
<urn:swrl#a> a swrl:Variable .
:DodgeRam a owl:NamedIndividual , :Truck .
:Truck a owl:Class ;
rdfs:subClassOf :Vehicle .
:Car a owl:Class ;
rdfs:subClassOf :Vehicle .
<urn:swrl#v> a swrl:Variable .
:LoadCargo a owl:NamedIndividual , :TruckAction .
[ a swrl:Imp ;
swrl:body [ a swrl:AtomList ;
rdf:first [ a swrl:ClassAtom ;
swrl:argument1 <urn:swrl#a> ;
swrl:classPredicate :GenericAction
] ;
rdf:rest [ a swrl:AtomList ;
rdf:first [ a swrl:ClassAtom ;
swrl:argument1 <urn:swrl#v> ;
swrl:classPredicate :Vehicle
] ;
rdf:rest ()
]
] ;
swrl:head [ a swrl:AtomList ;
rdf:first [ a swrl:IndividualPropertyAtom ;
swrl:argument1 <urn:swrl#v> ;
swrl:argument2 <urn:swrl#a> ;
swrl:propertyPredicate :hasAction
] ;
rdf:rest ()
]
] .
:Accelerate a owl:NamedIndividual , :GenericAction .
:F150 a owl:NamedIndividual , :Truck .
:FordFocusZX5 a owl:NamedIndividual , :Car .
[ a swrl:Imp ;
swrl:body [ a swrl:AtomList ;
rdf:first [ a swrl:ClassAtom ;
swrl:argument1 <urn:swrl#c> ;
swrl:classPredicate :Car
] ;
rdf:rest [ a swrl:AtomList ;
rdf:first [ a swrl:ClassAtom ;
swrl:argument1 <urn:swrl#a> ;
swrl:classPredicate :CarAction
] ;
rdf:rest ()
]
] ;
swrl:head [ a swrl:AtomList ;
rdf:first [ a swrl:IndividualPropertyAtom ;
swrl:argument1 <urn:swrl#c> ;
swrl:argument2 <urn:swrl#a> ;
swrl:propertyPredicate :hasAction
] ;
rdf:rest ()
]
] .
:Brake a owl:NamedIndividual , :GenericAction .
:hasAction a owl:ObjectProperty .
:GenericAction a owl:Class ;
rdfs:subClassOf :Action .
<https://stackoverflow.com/q/21512765/1281433/cars>
a owl:Ontology .
:Vehicle a owl:Class .
<urn:swrl#c> a swrl:Variable .
:ChevyMalibu a owl:NamedIndividual , :Car .
<urn:swrl#t> a swrl:Variable .
:CarAction a owl:Class ;
rdfs:subClassOf :Action .
[ a swrl:Imp ;
swrl:body [ a swrl:AtomList ;
rdf:first [ a swrl:ClassAtom ;
swrl:argument1 <urn:swrl#t> ;
swrl:classPredicate :Truck
] ;
rdf:rest [ a swrl:AtomList ;
rdf:first [ a swrl:ClassAtom ;
swrl:argument1 <urn:swrl#a> ;
swrl:classPredicate :TruckAction
] ;
rdf:rest ()
]
] ;
swrl:head [ a swrl:AtomList ;
rdf:first [ a swrl:IndividualPropertyAtom ;
swrl:argument1 <urn:swrl#t> ;
swrl:argument2 <urn:swrl#a> ;
swrl:propertyPredicate :hasAction
] ;
rdf:rest ()
]
] .
:TruckAction a owl:Class ;
rdfs:subClassOf :Action .
With rolification
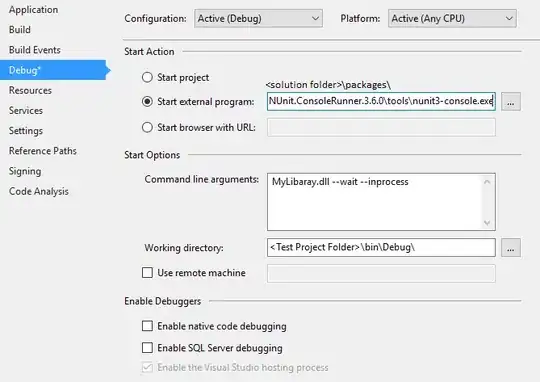
If you do this with rolification, it looks like this:

and you get the results you'd expect:
You can copy and paste this ontology:
@prefix : <https://stackoverflow.com/q/21512765/1281433/cars#> .
@prefix rdfs: <http://www.w3.org/2000/01/rdf-schema#> .
@prefix owl: <http://www.w3.org/2002/07/owl#> .
@prefix xsd: <http://www.w3.org/2001/XMLSchema#> .
@prefix rdf: <http://www.w3.org/1999/02/22-rdf-syntax-ns#> .
:GenericAction a owl:Class ;
rdfs:subClassOf :Action ;
owl:equivalentClass [ a owl:Restriction ;
owl:hasSelf true ;
owl:onProperty :R_GenericAction
] .
:Car a owl:Class ;
rdfs:subClassOf :Vehicle ;
owl:equivalentClass [ a owl:Restriction ;
owl:hasSelf true ;
owl:onProperty :R_Car
] .
:CarAction a owl:Class ;
rdfs:subClassOf :Action ;
owl:equivalentClass [ a owl:Restriction ;
owl:hasSelf true ;
owl:onProperty :R_CarAction
] .
:R_TruckAction a owl:ObjectProperty .
:R_Car a owl:ObjectProperty .
:Truck a owl:Class ;
rdfs:subClassOf :Vehicle ;
owl:equivalentClass [ a owl:Restriction ;
owl:hasSelf true ;
owl:onProperty :R_Truck
] .
:Brake a owl:NamedIndividual , :GenericAction .
:hasAction a owl:ObjectProperty ;
owl:propertyChainAxiom ( :R_Vehicle owl:topObjectProperty :R_GenericAction ) ;
owl:propertyChainAxiom ( :R_Car owl:topObjectProperty :R_CarAction ) ;
owl:propertyChainAxiom ( :R_Truck owl:topObjectProperty :R_TruckAction ) .
:R_CarAction a owl:ObjectProperty .
:R_Truck a owl:ObjectProperty .
:F150 a owl:NamedIndividual , :Truck .
:Accelerate a owl:NamedIndividual , :GenericAction .
:Action a owl:Class .
:ChevyMalibu a owl:NamedIndividual , :Car .
:R_Vehicle a owl:ObjectProperty .
:FordFocusZX5 a owl:NamedIndividual , :Car .
:R_GenericAction a owl:ObjectProperty .
:TruckAction a owl:Class ;
rdfs:subClassOf :Action ;
owl:equivalentClass [ a owl:Restriction ;
owl:hasSelf true ;
owl:onProperty :R_TruckAction
] .
:DodgeRam a owl:NamedIndividual , :Truck .
<https://stackoverflow.com/q/21512765/1281433/cars>
a owl:Ontology .
:LoadCargo a owl:NamedIndividual , :TruckAction .
:Vehicle a owl:Class ;
owl:equivalentClass [ a owl:Restriction ;
owl:hasSelf true ;
owl:onProperty :R_Vehicle
] .