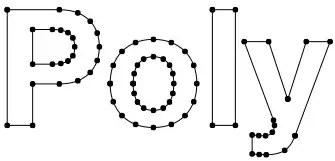
I'm trying to find grid elements with circle/cross or something filled inside it. I used code from here to build my logic.
Logic - Find grid coorindates -> Extract subimage of grid element using top-left and bottom-right coorindates of each rectangle block -> Find # of non-zero pixels -> If rectangle is more than 50% filled take it as filled
If grid is empty I am able to find all grid coordinates successfully. However, if any grid element is filled things do not work as expected as you can see from images. How can I fix this code to determine all grid coorindates successfully every time?


import cv2
import cv
import numpy as np
import operator
from PIL import Image
import math
region = cv2.imread("image.png")
img = cv2.GaussianBlur(region,(5,5),0)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
mask = np.zeros((gray.shape),np.uint8)
kernel1 = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(11,11))
close = cv2.morphologyEx(gray,cv2.MORPH_CLOSE,kernel1)
div = np.float32(gray)/(close)
res = np.uint8(cv2.normalize(div,div,0,255,cv2.NORM_MINMAX))
res2 = cv2.cvtColor(res,cv2.COLOR_GRAY2BGR)
##finding rectangles & creating mask image
thresh = cv2.adaptiveThreshold(res,255,0,1,19,2)
contour,hier = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
max_area = 0
best_cnt = None
for cnt in contour:
area = cv2.contourArea(cnt)
if area > 1000:
if area > max_area:
max_area = area
best_cnt = cnt
cv2.drawContours(mask,[best_cnt],0,255,-1)
cv2.drawContours(mask,[best_cnt],0,0,2)
res = cv2.bitwise_and(res,mask)
cv2.imwrite("res2.png",res)
##Finding vertical lines
kernelx = cv2.getStructuringElement(cv2.MORPH_RECT,(2,10))
dx = cv2.Sobel(res,cv2.CV_16S,1,0)
dx = cv2.convertScaleAbs(dx)
cv2.normalize(dx,dx,0,255,cv2.NORM_MINMAX)
ret,close = cv2.threshold(dx,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
close = cv2.morphologyEx(close,cv2.MORPH_DILATE,kernelx,iterations = 1)
contour, hier = cv2.findContours(close,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
for cnt in contour:
x,y,w,h = cv2.boundingRect(cnt)
if h/w > 5:
cv2.drawContours(close,[cnt],0,255,-1)
else:
cv2.drawContours(close,[cnt],0,0,-1)
close = cv2.morphologyEx(close,cv2.MORPH_CLOSE,None,iterations = 2)
closex = close.copy()
cv2.imwrite("res3.png",closex)
##Finding horizontal lines
kernely = cv2.getStructuringElement(cv2.MORPH_RECT,(10,2))
dy = cv2.Sobel(res,cv2.CV_16S,0,2)
dy = cv2.convertScaleAbs(dy)
cv2.normalize(dy,dy,0,255,cv2.NORM_MINMAX)
ret,close = cv2.threshold(dy,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
close = cv2.morphologyEx(close,cv2.MORPH_DILATE,kernely)
contour, hier = cv2.findContours(close,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
for cnt in contour:
x,y,w,h = cv2.boundingRect(cnt)
if w/h > 5:
cv2.drawContours(close,[cnt],0,255,-1)
else:
cv2.drawContours(close,[cnt],0,0,-1)
close = cv2.morphologyEx(close,cv2.MORPH_DILATE,None,iterations = 2)
closey = close.copy()
cv2.imwrite("res4.png",closey)
##Finding grid points
res = cv2.bitwise_and(closex,closey)
cv2.imwrite("res5.png",res)