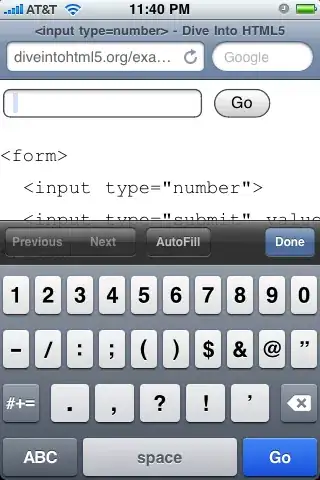
I have a half sphere image which contains some information inside. I'm trying to use Image rectification to transform the concave shape into flat image with out losing any information. Assume we have camera parameters (focal length and lens distortions factors). The image below shows an example. I'm trying to remove this depth and make half sphere looks flat surface.
I've been trying to solve a problem. I'm surprised I haven't been able to find anything really useful on the net. Where should I start to solve this problem. You can assume that we can use one image to solve this problem or two images from different angle of view.