I have difficulties simulating an object discribed by the following state space equations in simulink:
The right hand side of the state space equation is described by the funcion below.
function dxdt = RHS( t, x, F)
% parameters
b = 1.22; % cart friction coeffitient
c = 0.0027; %pendulum friction coeffitient
g = 9.81; % gravity
M = 0.548+0.022*2; % cart weight
m = 0.031*2; %pendulum masses
I = 0.046;%0.02*0.025/12+0.02*0.12^2+0.011*0.42^2; % moment of inertia
l = 0.1313;
% x(1) = theta
% x(2) = theta_dot
% x(3) = x
% x(4) = x_dot
dxdt = [x(2);
(-(M+m)*c*x(2)-(M+m)*g*l*sin(x(1))-m^2*l^2*x(2)^2*sin(x(1))*cos(x(1))+m*l*b*x(4)*cos(x(1))-m*l*cos(x(1))*F)/(I*(m+M)+m*M*l^2+m^2*l^2*sin(x(1))^2);
x(4);
(F - b*x(4) + l*m*x(2)^2*sin(x(1)) + (l*m*cos(x(1))*(c*x(2)*(M + m) + g*l*sin(x(1))*(M + m) + F*l*m*cos(x(1)) + l^2*m^2*x(2)^2*cos(x(1))*sin(x(1)) - b*l*m*x(4)*cos(x(1))))/(I*(M + m) + l^2*m^2*sin(x(1))^2 + M*l^2*m))/(M + m)];
end
The coresponding rk4 function with a simple visualisation is shown below.
function [wi, ti] = rk4 ( RHS, t0, x0, tf, N )
%RK4 approximate the solution of the initial value problem
%
% x'(t) = RHS( t, x ), x(t0) = x0
%
% using the classical fourth-order Runge-Kutta method - this
% routine will work for a system of first-order equations as
% well as for a single equation
%
% calling sequences:
% [wi, ti] = rk4 ( RHS, t0, x0, tf, N )
% rk4 ( RHS, t0, x0, tf, N )
%
% inputs:
% RHS string containing name of m-file defining the
% right-hand side of the differential equation; the
% m-file must take two inputs - first, the value of
% the independent variable; second, the value of the
% dependent variable
% t0 initial value of the independent variable
% x0 initial value of the dependent variable(s)
% if solving a system of equations, this should be a
% row vector containing all initial values
% tf final value of the independent variable
% N number of uniformly sized time steps to be taken to
% advance the solution from t = t0 to t = tf
%
% output:
% wi vector / matrix containing values of the approximate
% solution to the differential equation
% ti vector containing the values of the independent
% variable at which an approximate solution has been
% obtained
%
% x(1) = theta
% x(2) = theta_dot
% x(3) = x
% x(4) = x_dot
t0 = 0; tf = 5; x0 = [pi/2; 0; 0; 0]; N = 400;
neqn = length ( x0 );
ti = linspace ( t0, tf, N+1 );
wi = [ zeros( neqn, N+1 ) ];
wi(1:neqn, 1) = x0';
h = ( tf - t0 ) / N;
% force
u = 0.0;
%init visualisation
h_cart = plot(NaN, NaN, 'Marker', 'square', 'color', 'red', 'LineWidth', 6);
hold on
h_pend = plot(NaN, NaN, 'bo', 'LineWidth', 3);
axis([-5 5 -5 5]);
axis manual;
xlim([-5 5]);
ylim([-5 5]);
for i = 1:N
k1 = h * feval ( 'RHS', t0, x0, u );
k2 = h * feval ( 'RHS', t0 + (h/2), x0 + (k1/2), u);
k3 = h * feval ( 'RHS', t0 + h/2, x0 + k2/2, u);
k4 = h * feval ( 'RHS', t0 + h, x0 + k3, u);
x0 = x0 + ( k1 + 2*k2 + 2*k3 + k4 ) / 6;
t0 = t0 + h;
% model output
wi(1:neqn,i+1) = x0';
% model visualisation
%plotting cart
l = 2;
set(h_cart, 'XData', x0(3), 'YData', 0, 'LineWidth', 5);
%plotting pendulum
%hold on;
set(h_pend, 'XData', sin(x0(1))*l+x0(3), 'YData', -cos(x0(1))*l, 'LineWidth', 2);
%hold off;
% regulator
pause(0.02);
end;
figure;
plot(ti, wi);
legend('theta', 'theta`', 'x', 'x`');
This gives realistic looking results for a pendulum on a cart.
Now to the problem.
I wanted to recreate the exact same equations in simulink. I thought it is going to be as easy as creating the following simulink model.
 where I fill the fcn blocks with the second and fourth equation from the RHS file. Like this.
where I fill the fcn blocks with the second and fourth equation from the RHS file. Like this.
(-(M+m)*c*u(2)-(M+m)*g*l*sin(u(1))-m^2*l^2*u(2)^2*sin(u(1))*cos(u(1))+m*l*b*u(3)*cos(u(1))-m*l*cos(u(1))*u(4))/(I*(m+M)+m*M*l^2+m^2*l^2*sin(u(1))^2)
(u(5) - b*u(4) + l*m*u(2)^2*sin(u(1)) + (l*m*cos(u(1))*(c*u(2)*(M + m) + g*l*sin(u(1))*(M + m) + u(5)*l*m*cos(u(1)) + l^2*m^2*u(2)^2*cos(u(1))*sin(u(1)) - b*l*m*u(4)*cos(u(1))))/(I*(M + m) + l^2*m^2*sin(u(1))^2 + M*l^2*m))/(M + m)
The problem is this doesn't give the correct results from above, but the one below
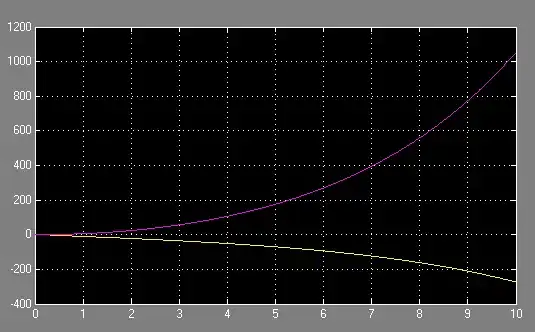
Does anybody know what I do incorrectly?
Edit:After @am304 comment I decided to add the following information. I changed the setting for the simulink solver to use the fixed-step rk4 solver, so as to get the same results. The second integrator3 from the model above has been initialized to pi/2.
Edit2: If somebody wants to check out the simulink model for themselves click on the link to download the file.
Edit3: As you can read in the answer below the problem was trivial. You can download the correct model here