Say I want to construct a 3D cubic Bézier curve, and I already have both end-points, and the direction (normal vector) for both control points. How can I choose the distance of both control points to their respective end-points in order to make the curve as 'nicely rounded' as possible?
To formalize 'nicely rounded': I think that means maximizing the smallest angle between any two segments in the curve. For example, having end-points (10, 0, 0) and (0, 10, 0) with respective normal vectors (0, 1, 0) and (1, 0, 0) should result in a 90° circular arc. For the specific case of 2D circular arcs, I've found articles like this one. But I haven't been able to find anything for my more general case.
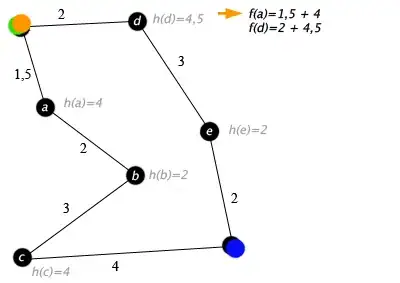

(Note that these images are just to illustrate the 'roundness' concept. My curves are not guaranteed to be plane-aligned. I may replace the images later to better illustrate that point.)
This is a question of aesthetics, and if the real solution is unknown or too complicated, I would be happy with a reasonable approximation. My current approximation is too simplistic: choosing half the distance between the two end-points for both control point distances. Someone more familiar with the math will probably be able to come up with something better.
(PS: This is for open-source software, and I would be happy to give credit on GitHub.)
Edit: Here are some other images to illustrate a 3D case (jsfiddle):

Edit 2: Here's a screenshot of an unstable version of ApiNATOMY to give you an idea of what I'm trying to do. I'm creating 3D tubes to represent blood-vessels, connecting different parts of an anatomical schematic:
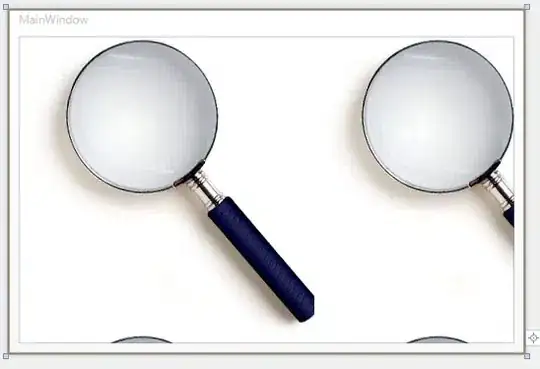
(They won't let me put in a jsfiddle link if I don't include code...)