You can:
1) threshold the HSV image on almost blue colors to get the poster mask:
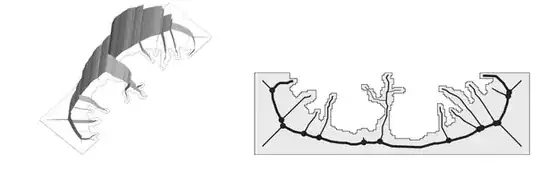
2) Find the external lines, and their intersections:
3) Apply a perspective transform:
4) Apply some color enhancement. Here I used the equivalent of Matlab imadjust. See here for the porting in OpenCV.
Here the full code. The comments should clarify each step. Please let me know if something is not clear.
#include <opencv2\opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void imadjust(const Mat1b& src, Mat1b& dst, int tol = 1, Vec2i in = Vec2i(0, 255), Vec2i out = Vec2i(0, 255))
{
// src : input CV_8UC1 image
// dst : output CV_8UC1 imge
// tol : tolerance, from 0 to 100.
// in : src image bounds
// out : dst image buonds
dst = src.clone();
tol = max(0, min(100, tol));
if (tol > 0)
{
// Compute in and out limits
// Histogram
vector<int> hist(256, 0);
for (int r = 0; r < src.rows; ++r) {
for (int c = 0; c < src.cols; ++c) {
hist[src(r, c)]++;
}
}
// Cumulative histogram
vector<int> cum = hist;
for (int i = 1; i < hist.size(); ++i) {
cum[i] = cum[i - 1] + hist[i];
}
// Compute bounds
int total = src.rows * src.cols;
int low_bound = total * tol / 100;
int upp_bound = total * (100 - tol) / 100;
in[0] = distance(cum.begin(), lower_bound(cum.begin(), cum.end(), low_bound));
in[1] = distance(cum.begin(), lower_bound(cum.begin(), cum.end(), upp_bound));
}
// Stretching
float scale = float(out[1] - out[0]) / float(in[1] - in[0]);
for (int r = 0; r < dst.rows; ++r)
{
for (int c = 0; c < dst.cols; ++c)
{
int vs = max(src(r, c) - in[0], 0);
int vd = min(int(vs * scale + 0.5f) + out[0], out[1]);
dst(r, c) = saturate_cast<uchar>(vd);
}
}
}
int main()
{
// Load image
Mat3b img = imread("path_to_image");
Mat3b dbg = img.clone(); // Debug image
// Convert to HSV
Mat3b hsv;
cvtColor(img, hsv, COLOR_BGR2HSV);
// Threshold on HSV values
Mat1b mask;
inRange(hsv, Scalar(100, 140, 120), Scalar(110, 170, 200), mask);
// Get the external boundaries
Mat1b top(mask.rows, mask.cols, uchar(0));
Mat1b bottom(mask.rows, mask.cols, uchar(0));
Mat1b left(mask.rows, mask.cols, uchar(0));
Mat1b right(mask.rows, mask.cols, uchar(0));
for (int r = 0; r < mask.rows; ++r)
{
// Find first in row
for (int c = 0; c < mask.cols; ++c)
{
if (mask(r, c))
{
left(r, c) = 255;
break;
}
}
// Find last in row
for (int c = mask.cols - 1; c >= 0; --c)
{
if (mask(r, c))
{
right(r, c) = 255;
break;
}
}
}
for (int c = 0; c < mask.cols; ++c)
{
// Find first in col
for (int r = 0; r < mask.rows; ++r)
{
if (mask(r, c))
{
top(r, c) = 255;
break;
}
}
// Find last in col
for (int r = mask.rows - 1; r >= 0; --r)
{
if (mask(r, c))
{
bottom(r, c) = 255;
break;
}
}
}
// Find lines
vector<Vec2f> linesTop, linesBottom, linesLeft, linesRight;
HoughLines(top, linesTop, 1, CV_PI / 180.0, 100);
HoughLines(bottom, linesBottom, 1, CV_PI / 180.0, 100);
HoughLines(left, linesLeft, 1, CV_PI / 180.0, 100);
HoughLines(right, linesRight, 1, CV_PI / 180.0, 100);
// Find intersections
Mat1b maskLines(mask.rows, mask.cols, uchar(0));
if (linesTop.empty() || linesBottom.empty() || linesLeft.empty() || linesRight.empty())
{
cout << "No enough lines detected" << endl;
return -1;
}
// Keep only the first line detected for each side
vector<Vec2f> lines{ linesTop[0], linesBottom[0], linesLeft[0], linesRight[0] };
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
// Get 2 points on each line
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
// Draw lines
Mat1b maskCurrentLine(mask.rows, mask.cols, uchar(0));
line(maskCurrentLine, pt1, pt2, Scalar(1), 1);
maskLines += maskCurrentLine;
line(dbg, pt1, pt2, Scalar(0, 0, 255), 3, CV_AA);
}
// Keep only intersections
maskLines = maskLines > 1;
// Get ordered set of vertices
vector<Point2f> vertices;
// Top left
Mat1b tl(maskLines(Rect(0, 0, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < tl.rows; ++r)
{
for (int c = 0; c < tl.cols; ++c)
{
if (tl(r, c))
{
vertices.push_back(Point2f(c, r));
}
}
}
// Top right
Mat1b tr(maskLines(Rect(mask.cols / 2, 0, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < tr.rows; ++r)
{
for (int c = 0; c < tr.cols; ++c)
{
if (tr(r, c))
{
vertices.push_back(Point2f(mask.cols / 2 + c, r));
}
}
}
// Bottom right
Mat1b br(maskLines(Rect(mask.cols / 2, mask.rows / 2, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < br.rows; ++r)
{
for (int c = 0; c < br.cols; ++c)
{
if (br(r, c))
{
vertices.push_back(Point2f(mask.cols / 2 + c, mask.rows / 2 + r));
}
}
}
// Bottom left
Mat1b bl(maskLines(Rect(0, mask.rows / 2, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < bl.rows; ++r)
{
for (int c = 0; c < bl.cols; ++c)
{
if (bl(r, c))
{
vertices.push_back(Point2f(c, mask.rows / 2 + r));
}
}
}
// Draw vertices
for (int i = 0; i < vertices.size(); ++i)
{
circle(dbg, vertices[i], 7, Scalar(0,255,0), CV_FILLED);
}
// Init output image
Mat3b result(img.rows, img.cols, Vec3b(0, 0, 0));
// Output vertices
vector<Point2f> verticesOut = { Point2f(0, 0), Point2f(img.cols, 0), Point2f(img.cols, img.rows), Point2f(0, img.rows) };
// Get transformation
Mat M = getPerspectiveTransform(vertices, verticesOut);
warpPerspective(img, result, M, result.size());
// Imadjust
vector<Mat1b> planes;
split(result, planes);
for (int i = 0; i < planes.size(); ++i)
{
imadjust(planes[i], planes[i]);
}
Mat3b adjusted;
merge(planes, adjusted);
imshow("Result", result);
imshow("Adjusted", adjusted);
waitKey();
return 0;
}





