My Problem is the following:
For my work I need to compare images of scanned photographic plates with a catalogue of a sample of known stars within the general area of the sky the plates cover (I call it the master catalogue). To that end I extract information, like the brightness on the image and the position in the sky, of the objects in the images and save it in tables. I then use python to create a polynomial fit for the calibration of the magnitude of the stars in the image. That works up to a certain accuracy pretty well, but unfortunately not well enough, since there is a small shift between the coordinates the object has in the photographic plates and in the master catalogue.
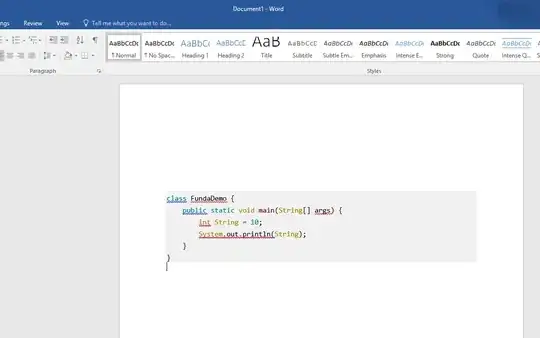
Here the green circles indicate the positions (center of the circle) of objects in the master catalogue. As you can see the actual stars are always situated to the upper left of the objects in the master catalogue.
I have looked a little bit in the comparison of images (i.e. How to detect a shift between images) but I'm a little at a loss now, because I'm not actually comparing images but arrays with the coordinates of the objects. An additional problem here is that (as you can see in the image) there are objects in the master catalogue that are not visible on the plates and not all plates have the same depth (meaning some show more stars than others do).
What I would like to know is a way to find and correct the linear shift between the 2 arrays of different size of coordinates in python. There shouldn't be any rotations, so it is just a shift in x and y directions. The arrays are normal numpy recarrays.