i would like some help for my AStar algorithm search, which takes from my point of view far to long. Even though my map is with 500 * 400 coordinates(objectively is my tile graph a bit smaller since I don't took the walls into the TileGraph.) large, I would like to expect the result after a few seconds. The world looks like this, despite the task not being mine
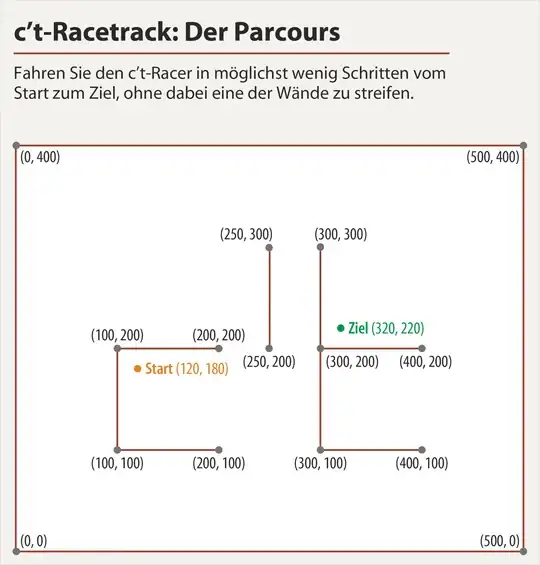
I want to search from marked coordinates "Start"(120|180) to "Ziel"(320|220), which currently takes 48 minutes. And sorry for all, who don't speak german, but the text at the picture isn't important.
At first I want to show you, what I've programmed for A*. In General adapted myself to the pseudocode at https://en.wikipedia.org/wiki/A*_search_algorithm .
bool AStarPath::Processing(Node* Start, Node* End)
m_Start = Start;
m_End = End;
for (Node* n : m_SearchRoom->GetAllNodes())
{
DistanceToStart[n] = std::numeric_limits<float>::infinity();
CameFrom[n] = nullptr;
}
DistanceToStart[m_Start] = 0;
NotEvaluatedNodes.AddElement(0, m_Start);
while (NotEvaluatedNodes.IsEmpty() == false)
{
Node* currentNode = NotEvaluatedNodes.GetElement();
NotEvaluatedNodes.DeleteElement();
if (currentNode == m_End)
{
ReconstructPath();
return true;
}
EvaluatedNodes.insert(currentNode);
ExamineNeighbours(currentNode);
}
return false;
//End Processing
void AStarPath::ExamineNeighbours(Node* current)
for (Node* neighbour : m_SearchRoom->GetNeighbours(current))
{
if (std::find(EvaluatedNodes.begin(), EvaluatedNodes.end(), neighbour) != EvaluatedNodes.end())
{
continue;
}
bool InOpenSet = NotEvaluatedNodes.ContainsElement(neighbour);
float tentative_g_score = DistanceToStart[current] + DistanceBetween(current, neighbour);
if (InOpenSet == true && tentative_g_score >= DistanceToStart[neighbour])
{
continue;
}
CameFrom[neighbour] = current;
DistanceToStart[neighbour] = tentative_g_score;
float Valuation = tentative_g_score + DistanceBetween(neighbour, m_End);
if (InOpenSet == false)
{
NotEvaluatedNodes.AddElement(Valuation, neighbour);
}
else
{
NotEvaluatedNodes.UpdatePriority(neighbour, Valuation);
}
}
//END ExamineNeighbours
double AStarPath::DistanceBetween(Node* a, Node* b)
return sqrt(pow(m_SearchRoom->GetNodeX(a) - m_SearchRoom->GetNodeX(b), 2)
+ pow(m_SearchRoom->GetNodeY(a) - m_SearchRoom->GetNodeY(b), 2));
//END DistanceBetween
I'm sorry for the bad formatting, but I don't really know how to work with the code blocks here.
class AStarPath
private:
std::unordered_set<Node*> EvaluatedNodes;
Binary_Heap NotEvaluatedNodes;
std::unordered_map<Node*, float> DistanceToStart;
std::unordered_map<Node*, Node*> CameFrom;
std::vector<Node*> m_path;
TileGraph* m_SearchRoom;
//END Class AStarPath
Anyway, i have thought myself over my problem already and changed some things. Firstly, I implemented a binary heap instead of the std::priority_queue. I used a page at policyalmanac for it, but I'm not permitted to add another link, so I can't really give you the address. It improved the performance, but it still takes quite long as I told at the beginning. Secondly, I used unordered containers (if there are two options), so that the containers don't have to be sorted after the changes. For my EvaluatedNodes I took the std::unordered_set, since from my knowledge it's fastest for std::find, which I use for containment checks. The usage of std::unordered_map is caused by the need of having seperate keys and values. Thirdly, I thought about splitting my map into nodes, which represent multiple coordinates(instead of now where one node represents one coordinate) , but I'm not really sure how to choose them. I thought about setting points at position, that the algorithm decises based on the length and width of the map and add neighbouring coordinates, if there aren't a specific distance or more away from the base node/coordinate and I can reach them only from previous added coordinates. To Check whether there is a ability to walk, I would have used the regular A*, with only the coordinates(converted to A* nodes), which are in these big nodes. Despite this I'm unsure which coordinates I should take for the start and end of this pathfinding. This would probably reduce the number of nodes/coordinates, which are checked, if I only use the coordinates/nodes, which were part of the big nodes.(So that only nodes are used, which where part of the bigger nodes at an upper level)
I'm sorry for my english, but hope that all will be understandable. I'm looking forward to your answers and learning new techniques and ways to handle problems and as well learn about all the hundreds of stupids mistakes I produced. If any important aspect is unclear or if I should add more code/information, feel free to ask.
EDIT: Binary_Heap
class Binary_Heap
private:
std::vector<int> Index;
std::vector<int> m_Valuation;
std::vector<Node*> elements;
int NodesChecked;
int m_NumberOfHeapItems;
void TryToMoveElementUp(int i_pos);
void TryToMoveElementDown(int i_pos);
public:
Binary_Heap(int i_numberOfElements);
void AddElement(int Valuation, Node* element);
void DeleteElement();
Node* GetElement();
bool IsEmpty();
bool ContainsElement(Node* i_node);
void UpdatePriority(Node* i_node, float newValuation);
Binary_Heap::Binary_Heap(int i_numberOfElements)
Index.resize(i_numberOfElements);
elements.resize(i_numberOfElements);
m_Valuation.resize(i_numberOfElements);
NodesChecked = 0;
m_NumberOfHeapItems = 0;
void Binary_Heap::AddElement(int valuation, Node* element)
++NodesChecked;
++m_NumberOfHeapItems;
Index[m_NumberOfHeapItems] = NodesChecked;
m_Valuation[NodesChecked] = valuation;
elements[NodesChecked] = element;
TryToMoveElementUp(m_NumberOfHeapItems);
void Binary_Heap::DeleteElement()
elements[Index[1]] = nullptr;
m_Valuation[Index[1]] = 0;
Index[1] = Index[m_NumberOfHeapItems];
--m_NumberOfHeapItems;
TryToMoveElementDown(1);
bool Binary_Heap::IsEmpty()
return m_NumberOfHeapItems == 0;
Node* Binary_Heap::GetElement()
return elements[Index[1]];
bool Binary_Heap::ContainsElement(Node* i_element)
return std::find(elements.begin(), elements.end(), i_element) != elements.end();
void Binary_Heap::UpdatePriority(Node* i_node, float newValuation)
if (ContainsElement(i_node) == false)
{
AddElement(newValuation, i_node);
}
else
{
int treePosition;
for (int i = 1; i < Index.size(); i++)
{
if (elements[Index[i]] == i_node)
{
treePosition = i;
break;
}
}
//Won't influence each other, since only one of them will change the position
TryToMoveElementUp(treePosition);
TryToMoveElementDown(treePosition);
}
void Binary_Heap::TryToMoveElementDown(int i_pos)
int nextPosition = i_pos;
while (true)
{
int currentPosition = nextPosition;
if (2 * currentPosition + 1 <= m_NumberOfHeapItems)
{
if (m_Valuation[Index[currentPosition]] >= m_Valuation[Index[2 * currentPosition]])
{
nextPosition = 2 * currentPosition;
}
if (m_Valuation[Index[currentPosition]] >= m_Valuation[Index[2 * currentPosition + 1]])
{
nextPosition = 2 * currentPosition + 1;
}
}
else
{
if (2 * currentPosition <= m_NumberOfHeapItems)
{
if (m_Valuation[Index[currentPosition]] >= m_Valuation[Index[2 * currentPosition]])
{
nextPosition = 2 * currentPosition;
}
}
}
if (currentPosition != nextPosition)
{
int tmp = Index[currentPosition];
Index[currentPosition] = Index[nextPosition];
Index[nextPosition] = tmp;
}
else
{
break;
}
}
void Binary_Heap::TryToMoveElementUp(int i_pos)
int treePosition = i_pos;
while (treePosition != 1)
{
if (m_Valuation[Index[treePosition]] <= m_Valuation[Index[treePosition / 2]])
{
int tmp = Index[treePosition / 2];
Index[treePosition / 2] = Index[treePosition];
Index[treePosition] = tmp;
treePosition = treePosition / 2;
}
else
{
break;
}
}