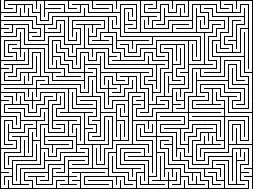
The code below is a maze solver (taken from this answer). It uses Start and Goal positions that were manually entered, and I need to change these coordinates each time I change the image to be solved.
Thus, I want to find a way to automatically generate these positions based on the image (it is a binary image, 0 means an empty square and 1 represents a wall).
My idea so far is to make a 'walk' outside the maze wall to determine these positions. The algorithm would visit each square and if its a zero than it would be considered as an entry/exit point.
So my question is: Does anyone know a way to visit all the squares of the outside wall to determine the entry and the goal positions? Or any other idea that would help me solve this problem?
import sys
import png
from PIL import Image
# using an A* Algorithm to solve the maze
def AStar(start, goal, neighbor_nodes, distance, cost_estimate):
def reconstruct_path(came_from, current_node):
path = []
while current_node is not None:
path.append(current_node)
current_node = came_from[current_node]
return list(reversed(path))
g_score = {start: 0}
f_score = {start: g_score[start] + cost_estimate(start, goal)}
openset = {start}
closedset = set()
came_from = {start: None}
while openset:
current = min(openset, key=lambda x: f_score[x])
if current == goal:
return reconstruct_path(came_from, goal)
openset.remove(current)
closedset.add(current)
for neighbor in neighbor_nodes(current):
if neighbor in closedset:
continue
if neighbor not in openset:
openset.add(neighbor)
tentative_g_score = g_score[current] + distance(current, neighbor)
if tentative_g_score >= g_score.get(neighbor, float('inf')):
continue
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + cost_estimate(neighbor, goal)
return []
def is_blocked(p):
x,y = p
pixel = path_pixels[x,y]
if any(c < 225 for c in pixel):
return True
def von_neumann_neighbors(p):
x, y = p
neighbors = [(x-1, y), (x, y-1), (x+1, y), (x, y+1)]
return [p for p in neighbors if not is_blocked(p)]
def manhattan(p1, p2):
return abs(p1[0]-p2[0]) + abs(p1[1]-p2[1])
def squared_euclidean(p1, p2):
return (p1[0]-p2[0])**2 + (p1[1]-p2[1])**2
start = (400, 984)
goal = (398, 25)
path_img = Image.open(sys.argv[1])
path_pixels = path_img.load()
distance = manhattan
heuristic = manhattan
path = AStar(start, goal, von_neumann_neighbors, distance, heuristic)
for position in path:
x,y = position
path_pixels[x,y] = (255,0,0) # the solution color path is red
path_img.save(sys.argv[2]) # or path_img.save('<outputfile>[.gif|.png|etc.]')
Code output: