I am struck with a problem. I want to convert the CMAttitude information of an iPhone to Altitude (0 to 90deg) and Azimuth (0 to 360 deg). I have googled around and hit some threads which discuss about it, but none of threads turn out with a positive answer and most of the articles discussing Quaternion and Euler angles are too much mathematics to stuff into my brain!
Is there some open source material which does this task easy? Or someone has written code to perform this conversion?
Edit: First off, sorry for being so abstract!
Azimuth is the direction on the surface of the earth towards which the device is pointing. Like North = 0 deg, North East = 45deg, East = 90 deg, South = 180 deg and so on. Ranges between 0 deg to 360 deg:

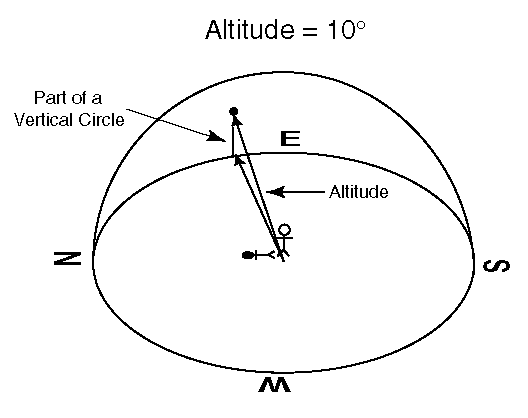
Altitude is the angle made from the plane of the earth to an object in the sky:
Thanks,
Raj