This is bit tricky because the right side of the content doesn't have an edge line. But can be addressed. Below is the code to achieve the expected result:
import numpy as np
import cv2
def order_points(pts):
rect = np.zeros((4, 2), dtype = "float32")
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
(tl, tr, br, bl) = pts
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
M = cv2.getPerspectiveTransform(pts, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
return warped
def intersection(line1, line2):
"""Finds the intersection of two lines given in Hesse normal form.
Returns closest integer pixel locations.
See https://stackoverflow.com/a/383527/5087436
"""
rho1, theta1 = line1
rho2, theta2 = line2
A = np.array([
[np.cos(theta1), np.sin(theta1)],
[np.cos(theta2), np.sin(theta2)]
])
b = np.array([[rho1], [rho2]])
x0, y0 = np.linalg.solve(A, b)
x0, y0 = int(np.round(x0)), int(np.round(y0))
return [[x0, y0]]
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None
(h, w) = image.shape[:2]
if width is None and height is None:
return image
if width is None:
r = height / float(h)
dim = (int(w * r), height)
else:
r = width / float(w)
dim = (width, int(h * r))
resized = cv2.resize(image, dim, interpolation=inter)
return resized
def draw_lines(image, lines):
for line in lines:
rho, theta = line
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(image, (x1, y1), (x2, y2), (0,0,255), 2)
image = cv2.imread('testimage4.jpg')
orig = image.copy()
draw = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = cv2.bitwise_not(gray)
sqKernel = cv2.getStructuringElement(cv2.MORPH_RECT, (45, 45)) # Increased kernel size
gray = cv2.morphologyEx(gray, cv2.MORPH_CLOSE, sqKernel)
thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)[1]
# Find the right most point of the content by finding contours.
# This is required as the content doesn't have extreme right edge line
cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5]
origH, origW = gray.shape[:2]
xMIN = origW
yMIN = origH
xwMAX = 0
yhMAX = 0
for c in cnts:
(x, y, w, h) = cv2.boundingRect(c)
if x > 5 and y > 5 and x + w < origW - 5 and y + h < origH - 5:
if xMIN > x: xMIN = x
if yMIN > y: yMIN = y
if xwMAX < x + w: xwMAX = x + w
if yhMAX < y + h: yhMAX = y + h
# Edge detection and houghlines transform for finding edge lines
edges = cv2.Canny(thresh, 50, 200)
lines = cv2.HoughLines(edges, 1, np.pi/180, 100)
# Filter out irrelevant lines from houghlines transform
strong_lines = np.zeros([12, 1, 2]) # Increased number of considered strong_lines
n2 = 0
for n1 in range(0,len(lines)):
for rho,theta in lines[n1]:
theta_diff = np.abs(np.abs(theta) - np.abs(strong_lines[0, 0, 1])) * 180 / np.pi
if theta_diff > 90:
theta_diff -= 90
if rho < 0:
rho*=-1
theta-=np.pi
if n1 == 0:
strong_lines[n2] = rho, theta
n2 = n2 + 1
elif n2 < 12 and not np.isclose(theta_diff, 45, atol=15):
closeness_rho = np.isclose(rho,strong_lines[0:n2,0,0],atol = max(image.shape) / 10) # One-tenth of the image width/height
closeness_theta = np.isclose(theta,strong_lines[0:n2,0,1],atol = np.pi/36)
closeness = np.all([closeness_rho,closeness_theta],axis=0)
if not any(closeness):
strong_lines[n2] = rho, theta
n2 = n2 + 1
# Removing the blank strong_lines entries
if n2 < strong_lines.shape[0]:
strong_lines.resize(n2, 1, 2)
# Grouping the filtered lines in horizontal and vertical categories
vert_ind = np.abs(strong_lines[:, :, 1] - 1.5) > 0.5
vert_lines = strong_lines[vert_ind]
hori_lines = strong_lines[np.logical_not(vert_ind), :]
test = np.argsort(np.abs(vert_lines[:, 0]))
vert_lines = vert_lines[test]
test = np.argsort(np.abs(hori_lines[:, 0]))
hori_lines = hori_lines[test]
# Extra vert_line to cater the right side where no houghlines will be detected
# After checking if the right most line is already there
far_point1 = intersection(vert_lines[0], hori_lines[0])
far_point2 = intersection(vert_lines[-1], hori_lines[-1])
if not np.isclose(far_point1[0][0], xwMAX, atol=10) and not np.isclose(far_point2[0][0], xwMAX, atol=10):
vert_lines = np.append(vert_lines, [[xwMAX, vert_lines[0][1]]], 0)
# Finding the intersection points of the lines
points = []
num_vert_lines = vert_lines.shape[0]
num_hori_lines = hori_lines.shape[0]
for i in range(num_vert_lines):
for j in range(num_hori_lines):
point = intersection(vert_lines[i], hori_lines[j])
points.append(point)
# Drawing the lines and points
draw_lines(draw, vert_lines)
draw_lines(draw, hori_lines)
[cv2.circle(draw, (p[0][0], p[0][1]), 5, 255, 2) for p in points]
# Finding the four corner points and ordering them
pts = np.asarray(points)
four_vertices = order_points(pts.reshape(pts.shape[0], pts.shape[2]))
# Giving a 5 pixels margin for better readability
four_vertices[0] = four_vertices[0][0] - 5, four_vertices[0][1] - 5
four_vertices[1] = four_vertices[1][0] + 5, four_vertices[1][1] - 5
four_vertices[2] = four_vertices[2][0] + 5, four_vertices[2][1] + 5
four_vertices[3] = four_vertices[3][0] - 5, four_vertices[3][1] + 5
# Perspective transform to get the warped image
warped = four_point_transform(orig, four_vertices)
# Displaying the results
cv2.imshow("Input", resize(image, height = 650))
cv2.imshow("Marks", resize(draw, height = 650))
cv2.imshow("Warped", resize(warped, height = 650))
cv2.waitKey(0)
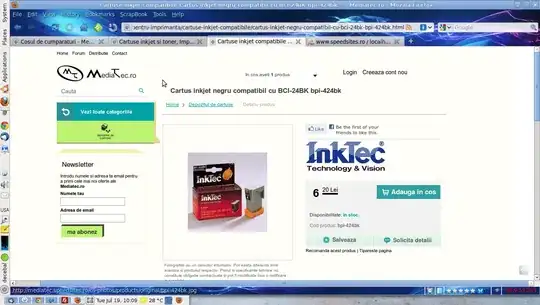
The input, marked input and warped output are as below:
Following changes are made in an attempt to make it generalized:
- Increased the kernel size of morphological CLOSE operation from (21, 21) to (45, 45). This is for better detection of the text area edges.
- Increased the number of considered strong_lines from 6 to 12.
- Generalized the rho closeness tolerance from fixed 100 value to 1/10 of image width or height whichever is larger.
- Added checking to remove blank strong_lines entries.
- Added condition to check if there is already right-most edge line detected. If so then no need to add extra vertical orientation line to cover the full content.
This modified code applied for all four test images and each of them produced the warped images correctly. Below are the warped images for each of the test images:
First warped test image:
Second warped test image:

Third warped test image:

Fourth warped test image:







{kind=link}