Given a set of ordered points, and a path made up of ordered lat,lon points that goes near those points (in lat/lon coordinates), I want to associate the points with the path, ideally with good algorithmic complexity (n*log(n)) or better, but maybe that might not be realistic.
The below diagram illustrates my question better. The blue line is the ordered path that is provided, and the red points are in the same order as the blue line. The green path is my desired result, which merges the red points and the blue line into a new ordered path.
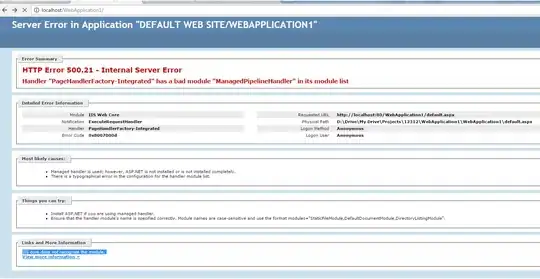
Some threshold would have to be set for the distance of the red points from the blue path, let's assume that the red points are at most 50 meters from the blue path.
So, this is definitely the most mathmatical and unusual question I have asked on Stack Overflow. Any ideas would be great on solving this. I am planning to use it to merge GTFS shape data with trip data which describes stop times, and build it into the open source project, Depart App.
Thanks for your help!