return [((fol/v[2])*v[0]+x),((fol/v[2])*v[1]+y)];
Point at [0,0,1] will be x=0 and y=0, unless you add center screen xy - it's not camera xy. fol is focal length, derived from fov angle and screen width - how high is the triangle (tangent). This method will not match three.js perspective matrix, which is why am I looking for that.
I should not be looking for it. I matched xy on openGL, perfectly like super glue! But I cannot get it to work right in java. THAT Perfect match follows.
var pmat = [0,0,0,0,0,0,0,0,0,0,
(farclip + nearclip) / (nearclip - farclip),-1,0,0,
2*farclip*nearclip / (nearclip - farclip),0 ];
void setpmat() {
double fl; // = tan(dtor(90-fovx/aspect/2)); /// UNIT focal length
fl = 1/tan(dtor(fov/Aspect/2)); /// same number
pmat[0] = fl/Aspect;
pmat[5] = fl;
}
void fovmat(double v[],double p[]) {
int cx = (int)(_Width/2),cy = (int)(_Height/2);
double pnt2[4], pnt[4] = { 0,0,0,1 } ;
COPYVECTOR(pnt,p);NORMALIZE(pnt);
popmatrix4(pnt2,pmat,pnt);
COPYVECTOR(v,pnt2);
v[0] *= -cx; v[1] *= -cy;
v[0] += cx; v[1] += cy;
} // world to screen matrix
void w2sm(int xy[],double p[]) {
double v[3]; fovmat(v,p);
xy[0] = (int)v[0];
xy[1] = (int)v[1];
}
I have one more way to match three.js xy, til I get the matrix working, just one condition. must run at Aspect of 2
function w2s(fol,v,x,y) {
var a = width / height;
var b = height/width ;
/// b = .5 // a = 2
var f = 1/Math.tan(dtor(_fov/a)) * x * b;
return [intr((f/v[2])*v[0]+x),intr((f/v[2])*v[1]+y)];
}
Use it with the inverted camera matrix, you will need invert_matrix().
v = orbital(i);
v = subv(v,campos);
v3 = popmatrix(wmatrix,v); //inverted mat
if (v3[2] > 0) {
xy = w2s(flen,v3,cx,cy);
Finally here it is, (everyone ought to know by now), the no-matrix match, any aspect.
function angle2fol(deg,centerx) {
var b = width / height;
var a = dtor(90 - (clamp(deg,0.0001,174.0) / 2));
return asa_sin(PI_5,centerx,a) / b;
}
function asa_sin(a,s,b) {
return Math.sin(b) * (s / Math.sin(PI-(a+b)));
} // ASA solve opposing side of angle2 (b)
function w2s(fol,v,x,y) {
return [intr((fol/v[2])*v[0]+x),intr((fol/v[2])*v[1]+y)];
}
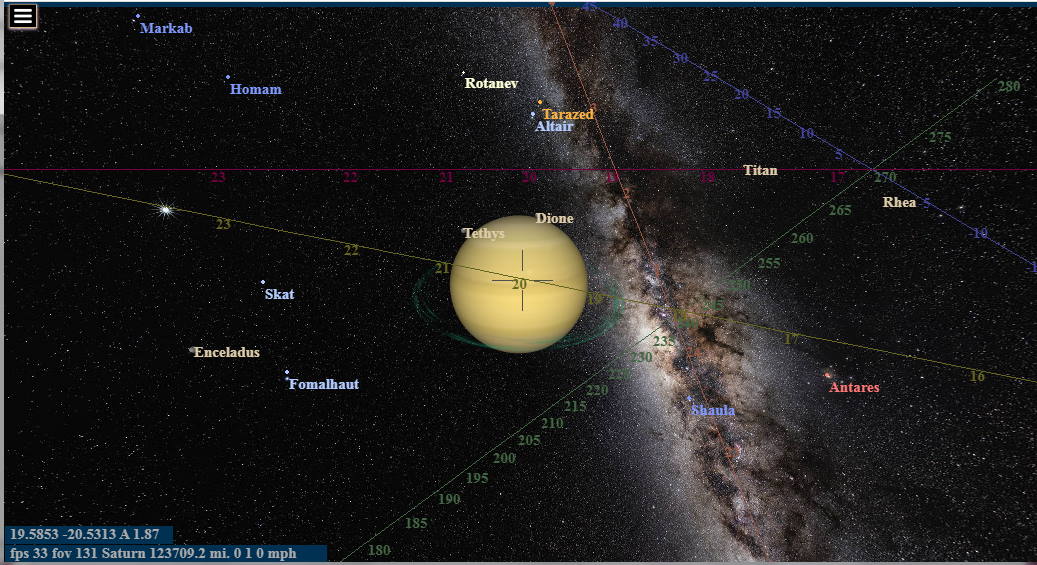
Updated the image for the proof. Input _fov gets you 1.5 that, "approximately." To see the FOV readout correctly, redo the triangle with the new focal length.
function afov(deg,centerx) {
var f = angle2fol(deg,centerx);
return rtod(2 * sss_cos(f,centerx,sas_cos(f,PI_5,centerx)));
}
function sas_cos(s,a,ss) {
return Math.sqrt((Math.pow(s,2)+Math.pow(ss,2))-(2*s*ss*Math.cos(a)));
} // Side Angle Side - solve length of missing side
function sss_cos(a,b,c) {
with (Math) {
return acos((pow(a,2)+pow(c,2)-pow(b,2))/(2*a*c));
}
} // SSS solve angle opposite side2 (b)
Star library confirmed the perspective, then possible to measure the VIEW! http://innerbeing.epizy.com/cwebgl/perspective.jpg
I can explain the 90 deg correction to moon's north pole in one word precession. So what is the current up vector. pnt? radec?
function ininorths() {
if (0) {
var c = ctime;
var v = LunarPos(jdm(c));
c += secday();
var vv = LunarPos(jdm(c));
vv = crossprod(v,vv);
v = eyeradec(vv);
echo(v,vv);
v = [266.86-90,65.64]; //old
}
var v = [282.6425,65.8873]; /// new.
// ...
}
I have yet to explain the TWO sets of vectors: Three.milkyway.matrix and the 3D to 2D drawing. They ARE:
function drawmilkyway() {
var v2 = radec2pos(dtor(192.8595), dtor(27.1283),75000000);
// gcenter 266.4168 -29.0078
var v3 = radec2pos(dtor(266.4168), dtor(-29.0078),75000000);
// ...
}
function initmwmat() {
var r,u,e;
e = radec2pos(dtor(156.35), dtor(12.7),1);
u = radec2pos(dtor(60.1533), dtor(25.5935),1);
r = normaliz(crossprod(u,e));
u = normaliz(crossprod(e,r));
e = normaliz(crossprod(r,u));
var m = MilkyWayMatrix;
m[0]=r[0];m[1]=r[1];m[2]=r[2];m[3]=0.0;
m[4]=u[0];m[5]=u[1];m[6]=u[2];m[7]=0.0;
m[8]=e[0];m[9]=e[1];m[10]=e[2];m[11]=0.0;
m[12]=0.0;m[13]=0.0;m[14]=0.0;m[15]=1.0;
}
/// draw vectors and matrix were the same in C !
void initmwmat(double m[16]) {
double r[3], u[3], e[3];
radec2pos(e,dtor(192.8595), dtor(27.1283),1); //up
radec2pos(u,dtor(266.4051), dtor(-28.9362),-1); //eye
}
{kind=link}