This is pinhole camera model:
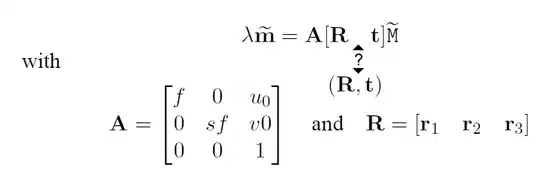
(I don't get, is there [R t], or (R, t)) This formula is translating the 3d coordinates of the point, to the 2d coordinates of a picture, which is obtained by pinhole camera.
Projection drawing:
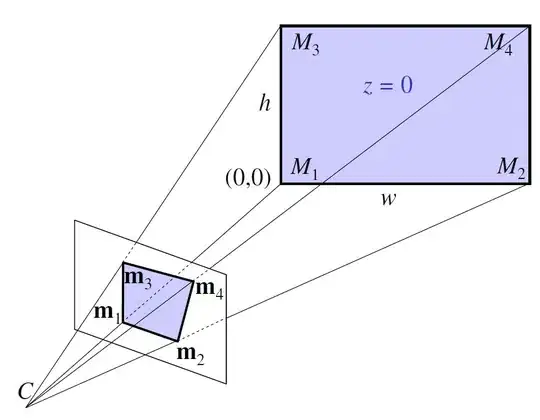
Tilde over vector, means that "1" is added to that vector as the element. M is the coordinate of the point in the 3d space, and m is the coordinate of the point in the picture, f is the focal length of the camera, аnd s is the pixel aspect ratio. (R, t) describes the 3D transformation between the world coordinate system, in which the rectangle is described, and the camera coordinate system.
It is unclear to me, what is mean [R t] (or (R, t)) after A, and how, by inserting the 3D coordinates (pixel aspect ratio = 1) of the corners to the formula we get this:
And what does "t" letter mean?
I found this formula in here (page 13).