I think that you need to multiply by two matrices to change the basis of your rotation matrix.
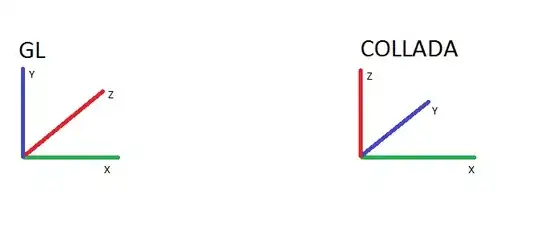
Indeed, the ColladaMatrix is the one that does ([col] mean in the collada coordinates, [gl] in the GL coordinates)
y[col] = R[col,col] x[col]
but if you want to use the GL matrix, you need to transform the x[col] into GL coordinates, then apply the rotation in the GL basis and finally come back to the Collada coordinates. So
y[col] = B[gl->col] R[gl,gl] B[col->gl] x[col]
So,
R[col,col] = B[gl->col] R[gl,gl] B[col->gl]
and here B[gl->col] and B[col->gl] are the same, so
[1 0 0 [1 0 0
MatrixCollada = 0 0 1 * MatrixGL * 0 0 1
0 1 0] 0 1 0]
Hope it helps!
Remark: The same happen when diagonalizing a matrix (which is actually a change of basis), you need to pre- and post-multiply the matrix that you want to diagonalize.
Edit: I wrote the two coordinates systems for the matrices, because in general, a matrix can send a vector from a coordinate system to another one. This makes it more clear.