Original Question:
Problem
I have a unit cube that I would like to transform such that it connects two points. I am new to OpenGL and only know the most basic parts of linear algebra. I have attempted to mimic something similar to polar coordinates in my endeavor to connect the dots. My current implementation does not work when there is a change in Z and another axis. I also tried mat = glm::lookAt(center, terminal, y_axis);, but I did not have success.
Code
This comes from the body of a for loop located in schedule_edge_update().
auto const initial = p1;
auto const terminal = p2;
auto const distance = glm::distance(initial, terminal);
auto const length = distance * 0.5f;
auto const center = (initial + terminal) / 2.f;
auto const rejection = terminal - initial;
auto const delta = glm::normalize(rejection);
auto mat = glm::mat4(1);
// translate
mat = glm::translate(mat, center);
// rotate
auto const phi_hyp = glm::length(glm::vec2(delta.x, delta.z));
if (phi_hyp != 0.0f) {
auto phi = acosf(delta.x / phi_hyp);
mat = glm::rotate(mat, phi, y_axis);
}
auto const theta_hyp = glm::length(glm::vec2(delta.x, delta.y));
if (theta_hyp != 0.0f) {
auto theta = acosf(delta.x / theta_hyp);
theta *= delta.x > 0 ? -1.0f : 1.0f;
mat = glm::rotate(mat, theta, z_axis);
}
// scale
edges->add_matrix(glm::scale(mat, glm::vec3(length, 0.05f, 0.01f)));
When a matrix is added to edges it is queued to be buffered for instanced rendering.
Far Away
Here are my testing points and a big cube I made.
Close Up
Here is an example of it not working. The initial point is labeled p1 and the terminal point p2. The line that isn't connecting any points should be connecting p1 and p2.
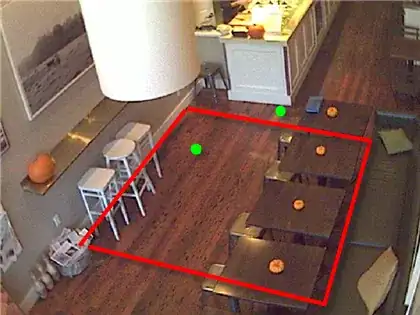
Different Close Up
Here is another example, but this one has the coordinates for p1 and p2 labeled. p1 and p2 differ by a change in Y and Z. However, my code rotates the cube (after translating it) around the y axis 90 degrees. Then is scales it. You can tell it is rotated because it is wider on one of the axis (the y-axis before rotation).

Full List of Coordinates
// Test points
auto const A = glm::vec3(-10.0f, -10.0f, -20.0f);
auto const B = glm::vec3(+10.0f, -10.0f, -20.0f);
auto const C = glm::vec3(+10.0f, +10.0f, -20.0f);
auto const D = glm::vec3(+00.0f, +10.0f, -20.0f);
auto const E = glm::vec3(+05.0f, +05.0f, -20.0f);
auto const F = glm::vec3(+00.0f, +00.0f, -30.0f);
auto const G = glm::vec3(-10.0f, -10.0f, -30.0f);
auto const H = glm::vec3(+55.0f, -15.0f, -60.0f);
auto const I = glm::vec3(+55.0f, -05.0f, -70.0f);
get_nodes().emplace_back(A);
get_nodes().emplace_back(B);
get_nodes().emplace_back(C);
get_nodes().emplace_back(D);
get_nodes().emplace_back(E);
get_nodes().emplace_back(F);
get_nodes().emplace_back(G);
get_nodes().emplace_back(H);
get_nodes().emplace_back(I);
get_edges().emplace_back(A, B);
get_edges().emplace_back(B, C);
get_edges().emplace_back(C, D);
get_edges().emplace_back(D, E);
get_edges().emplace_back(E, F);
get_edges().emplace_back(F, G);
get_edges().emplace_back(G, H);
get_edges().emplace_back(H, I);
// Big cube
auto const C0 = glm::vec3(-5.0f, -5.0f, -5.0f);
auto const C1 = glm::vec3(-5.0f, -5.0f, +5.0f);
auto const C2 = glm::vec3(-5.0f, +5.0f, -5.0f);
auto const C3 = glm::vec3(-5.0f, +5.0f, +5.0f);
auto const C4 = glm::vec3(+5.0f, -5.0f, -5.0f);
auto const C5 = glm::vec3(+5.0f, -5.0f, +5.0f);
auto const C6 = glm::vec3(+5.0f, +5.0f, -5.0f);
auto const C7 = glm::vec3(+5.0f, +5.0f, +5.0f);
get_nodes().emplace_back(C0);
get_nodes().emplace_back(C1);
get_nodes().emplace_back(C2);
get_nodes().emplace_back(C3);
get_nodes().emplace_back(C4);
get_nodes().emplace_back(C5);
get_nodes().emplace_back(C6);
get_nodes().emplace_back(C7);
get_edges().emplace_back(C0, C1);
get_edges().emplace_back(C0, C2);
get_edges().emplace_back(C0, C4);
get_edges().emplace_back(C1, C3);
get_edges().emplace_back(C1, C5);
get_edges().emplace_back(C2, C3);
get_edges().emplace_back(C2, C6);
get_edges().emplace_back(C3, C7);
get_edges().emplace_back(C4, C5);
get_edges().emplace_back(C4, C6);
get_edges().emplace_back(C5, C7);
get_edges().emplace_back(C6, C7);
schedule_node_update();
schedule_edge_update();
Spektre's Solution Using GLM
Code
auto constexpr A = vec3(-0.5f, 0.0f, 0.0f);
auto constexpr B = vec3(+0.5f, 0.0f, 0.0f);
auto const C = p1;
auto const D = p2;
auto M = mat4(1.0f);
// Translate
auto const center = 0.5 * (C + D);
M = translate(M, center);
// Rotate
auto constexpr p = B - A;
auto const q = D - C;
auto const n = cross(p, q);
if (n != vec3()) {
auto const a = angle(normalize(p), normalize(q));
M = rotate(M, a, n);
}
// Scale
auto constexpr thickness = 0.05f;
M = scale(M, vec3(0.5f * distance(C, D), thickness, thickness));
edges->add_matrix(M);
Successful Result


{kind=link}