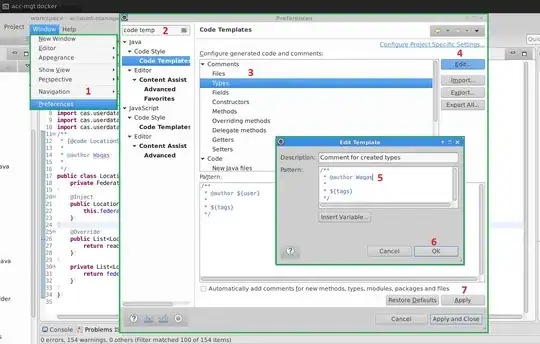
I'm reading data from a sensor. The sensor give an array of points (x,y). But as you can see in the image, there is a lot of noise:
 .
.
I need to clean the data in a way that the data filtered, give a few points . Using something like Median,adjacent averaging, mean of the xy points or an algorithm that removes the noise. I know that there are a bunch of libraries in Python that make the work automatically. All the auto libraries that I found are base on image analysis and I think they do not work for this case because this is different, these are points (x,y) in a dataset.
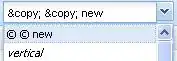
point-cloud noise cleaned:
PD: I wanted to do the median of the points but i got confused when i tried with an bidimensional array (this mean ListOfPoints[[x,y],[x,y],[x,y],[x,y],[x,y],[x,y]]) I didn't know how to make that calculation with for or while to iterate and make the calc. I prefer C#, but if there is a solution in other language without libraries, I would be open to it.